Sheng Yang
Open Menu
Close Menu
Home
Projects
Papers
Bio
SLAM
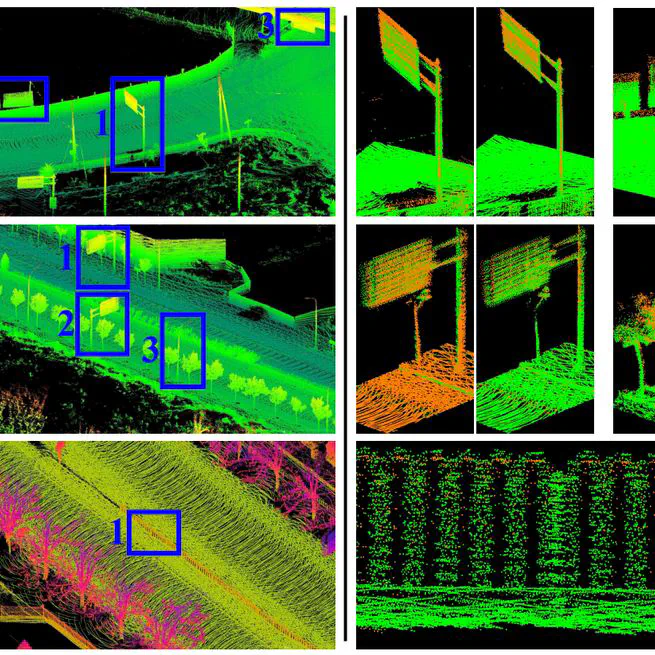
A Robust Pose Graph Approach for City Scale LiDAR Mapping
Oct 1, 2018
« Previous