Sheng Yang
Open Menu
Close Menu
Home
Projects
Papers
Bio
IROS
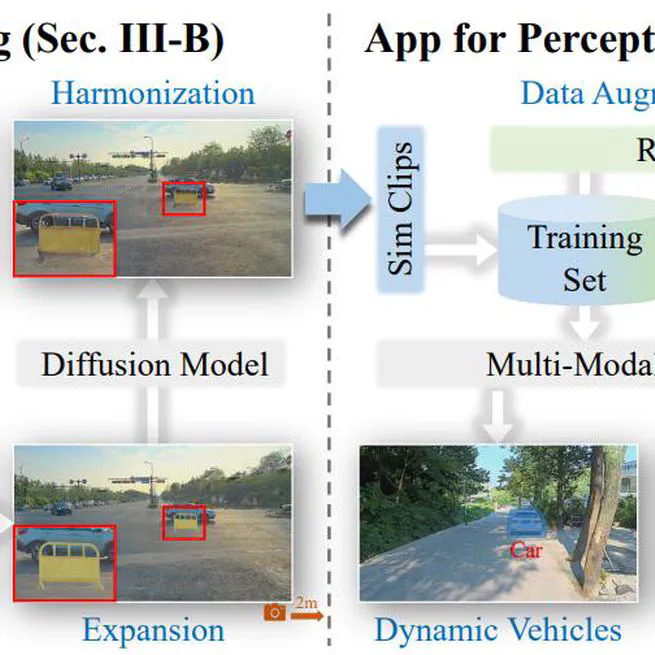
Industrial-Grade Sensor Simulation via Gaussian Splatting: A Modular Framework for Scalable Editing and Full-Stack Validation
Jun 15, 2025
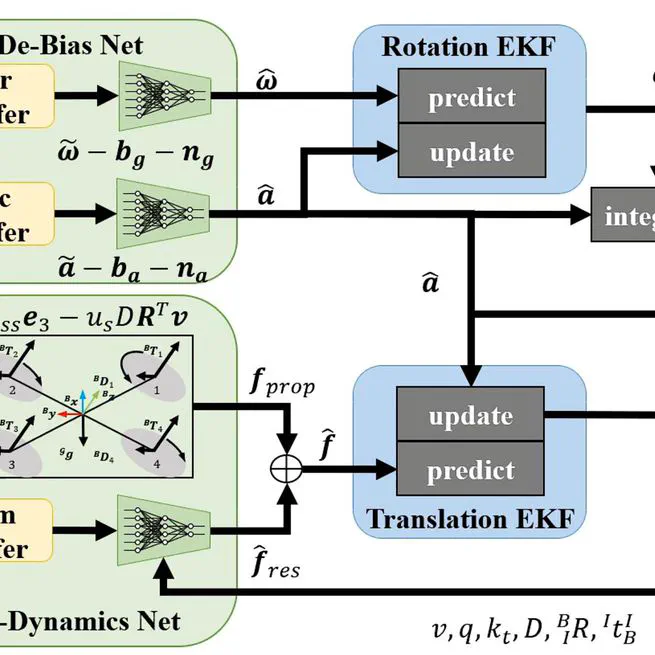
DIDO: Deep Inertial Quadrotor Dynamical Odometry
Jul 7, 2022
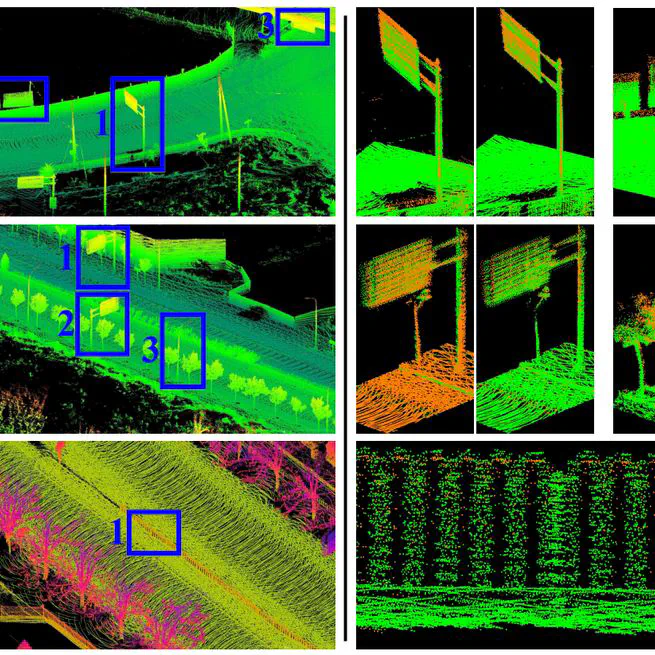
A Robust Pose Graph Approach for City Scale LiDAR Mapping
Oct 1, 2018