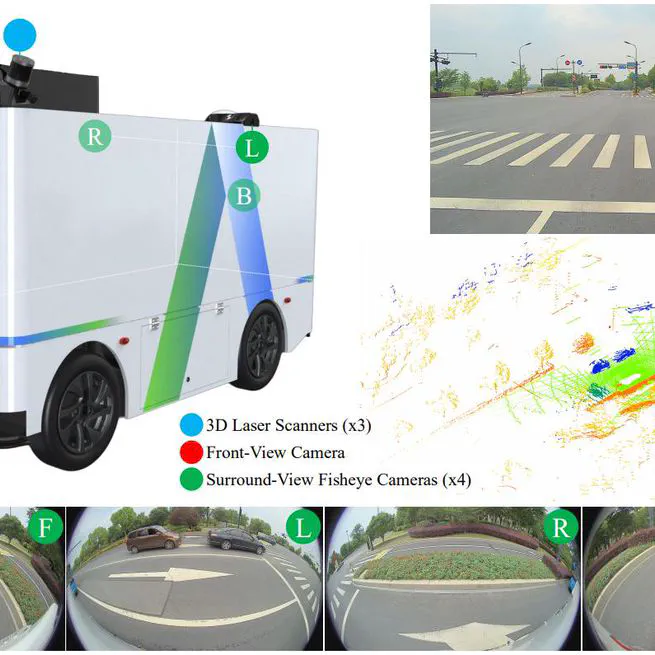
Para-Lane: Multi-Lane Dataset Registering Parallel Scans for Benchmarking Novel View Synthesis
Mar 25, 2025
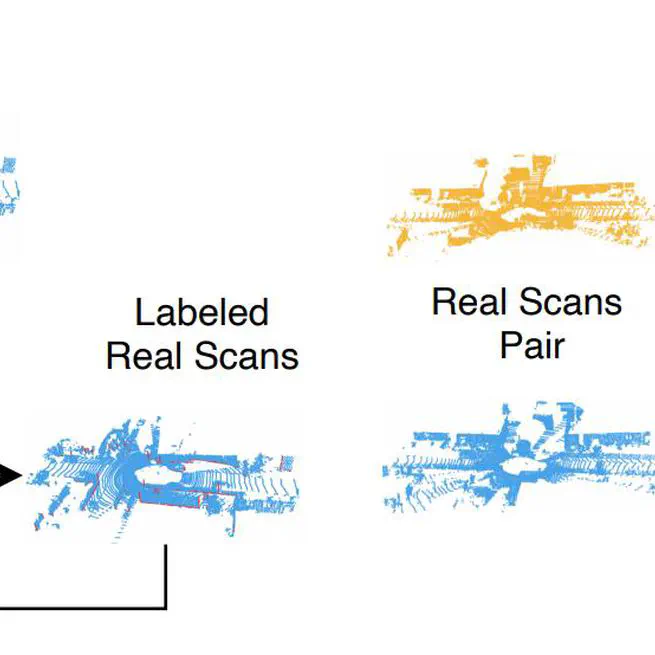
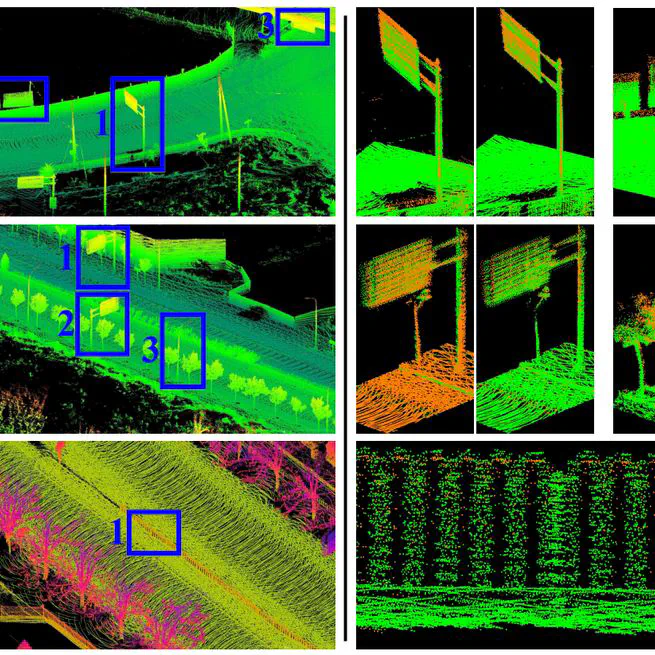
SuperLine3D: Self-supervised Line Segmentation and Description for LiDAR Point Cloud
Nov 6, 2022
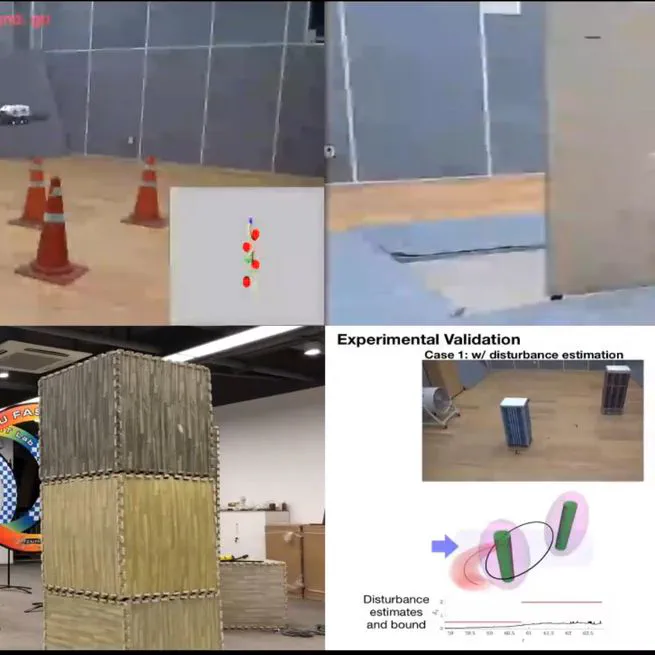
The Visual-Inertial-Dynamical Multirotor Dataset
May 23, 2022
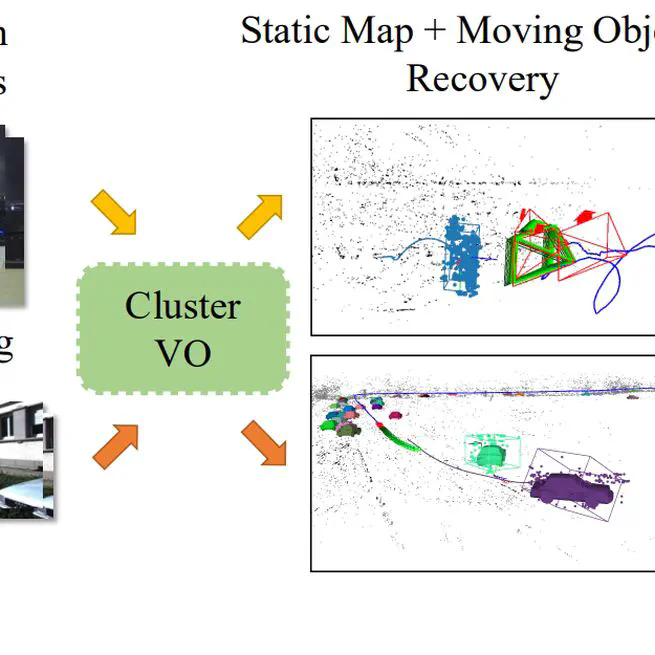
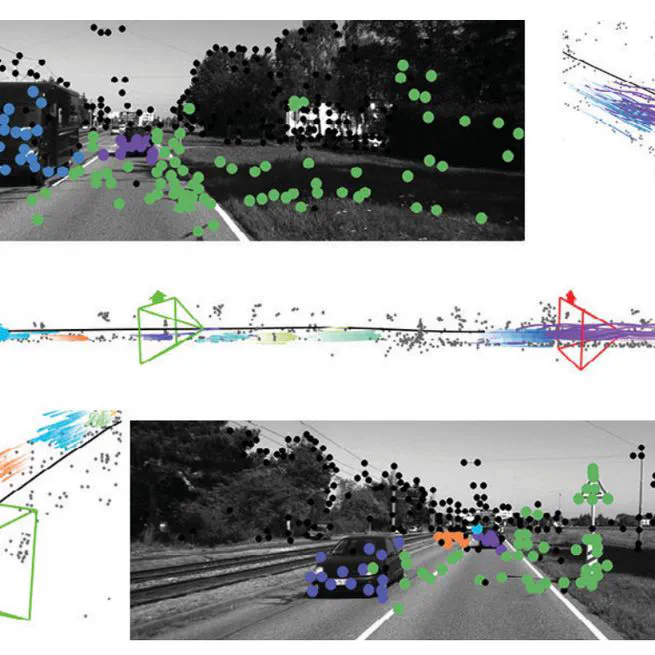
ClusterVO: Clustering Moving Instances and Estimating Visual Odometry for Self and Surroundings
Jun 13, 2020

Morphing and Sampling Network for Dense Point Cloud Completion
Feb 7, 2020
ClusterSLAM: A SLAM Backend for Simultaneous Rigid Body Clustering and Motion Estimation
Oct 27, 2019
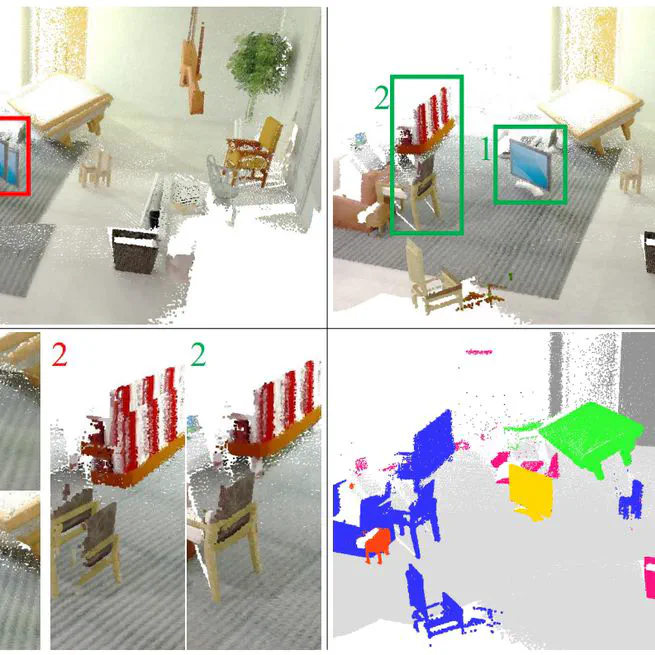
Probabilistic Projective Association and Semantic Guided Relocalization for Dense Reconstruction
May 20, 2019
A Robust Pose Graph Approach for City Scale LiDAR Mapping
Oct 1, 2018