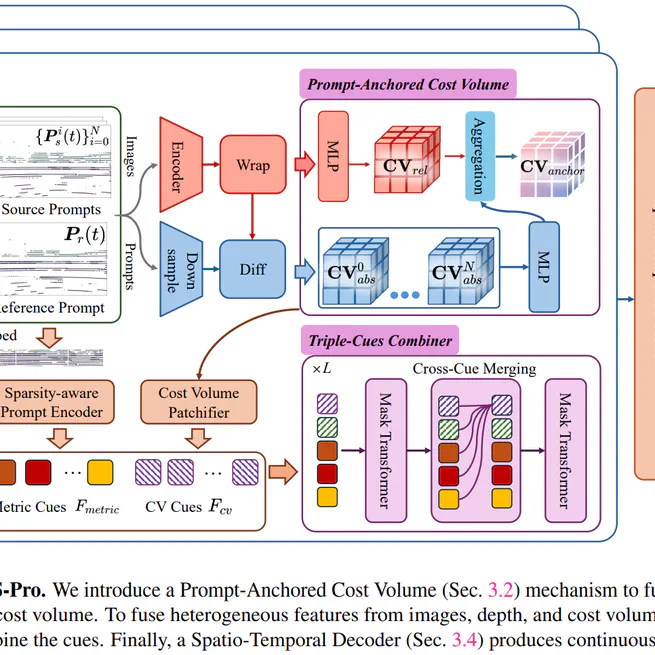
LiDAR Prompted Spatio-Temporal Multi-View Stereo for Autonomous Driving
Mar 5, 2026
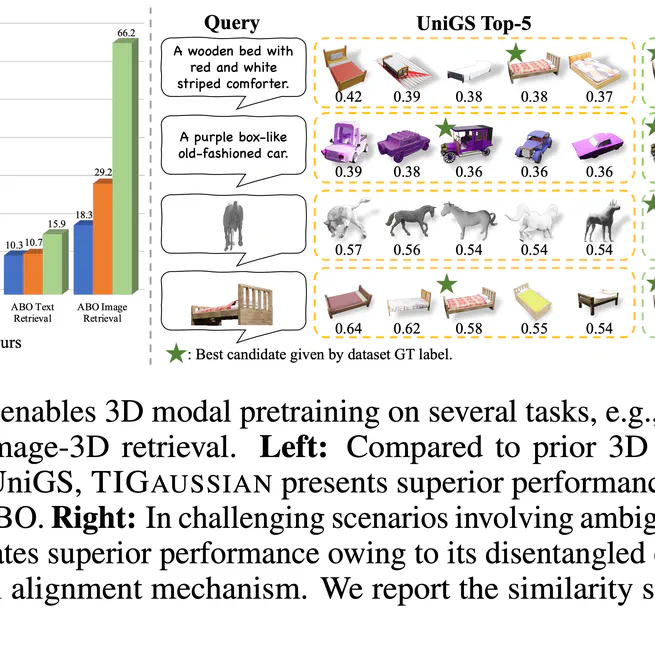
TIGaussian: Disentangle Gaussians for Spatial-Awared Text-Image-3D Alignment
Jan 28, 2026
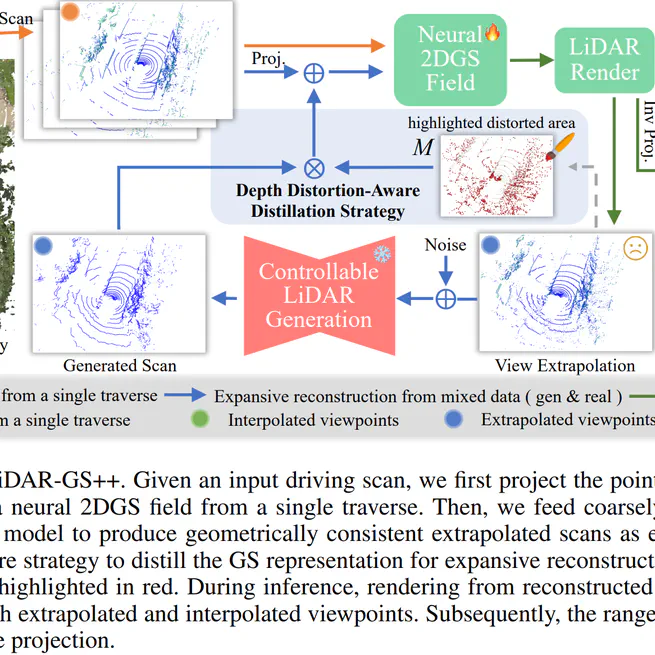
LiDAR-GS++: Improving LiDAR Gaussian Reconstruction via Diffusion Priors
Jan 20, 2026
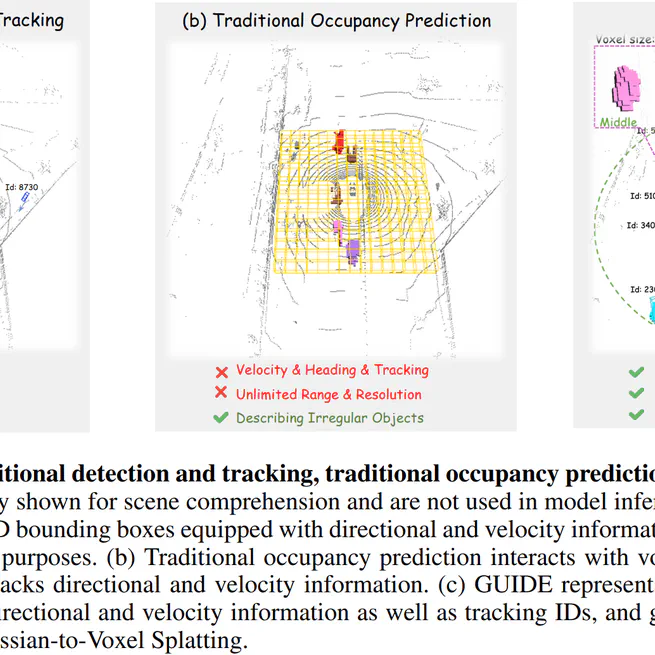
GUIDE: Gaussian Unified Instance Detection for Enhanced Obstacle Perception in Autonomous Driving
Jan 20, 2026
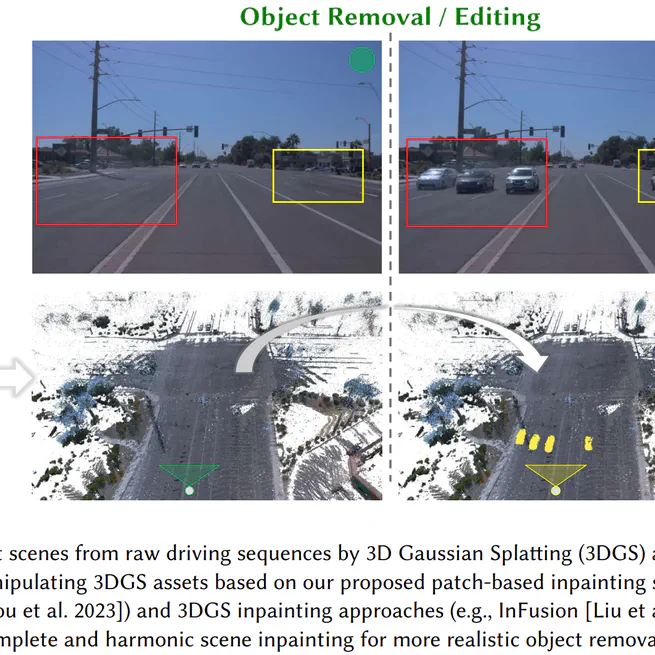
GS-RoadPatching: Inpainting Gaussians via 3D Searching and Placing for Driving Scenes
Oct 1, 2025
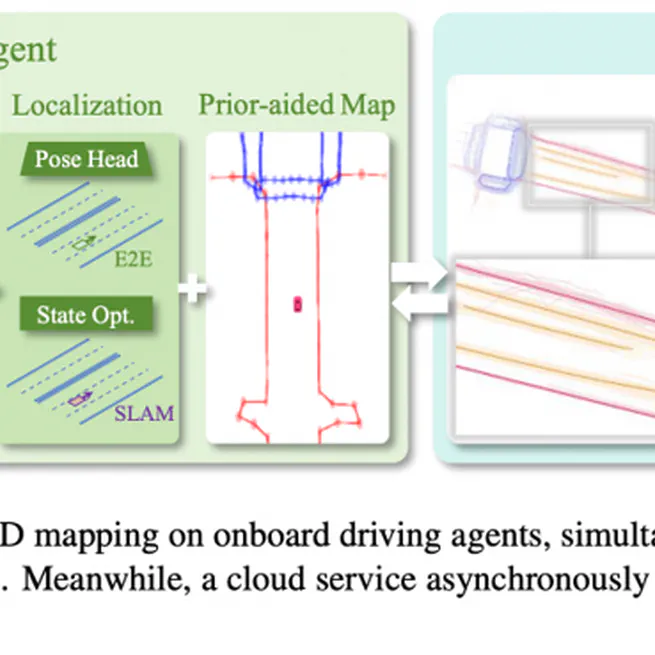
RTMap: Real-Time Recursive Mapping with Change Detection and Localization
Jul 1, 2025
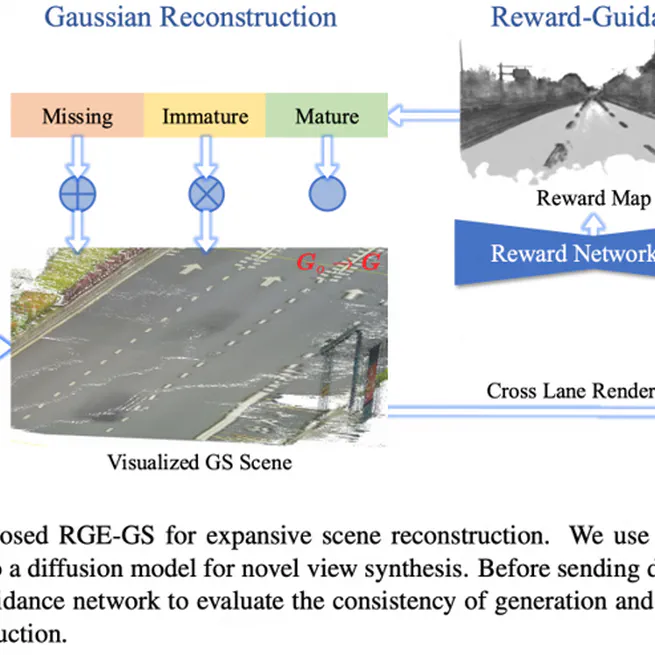
RGE-GS: Reward-Guided Expansive Driving Scene Reconstruction via Diffusion Priors
Jul 1, 2025
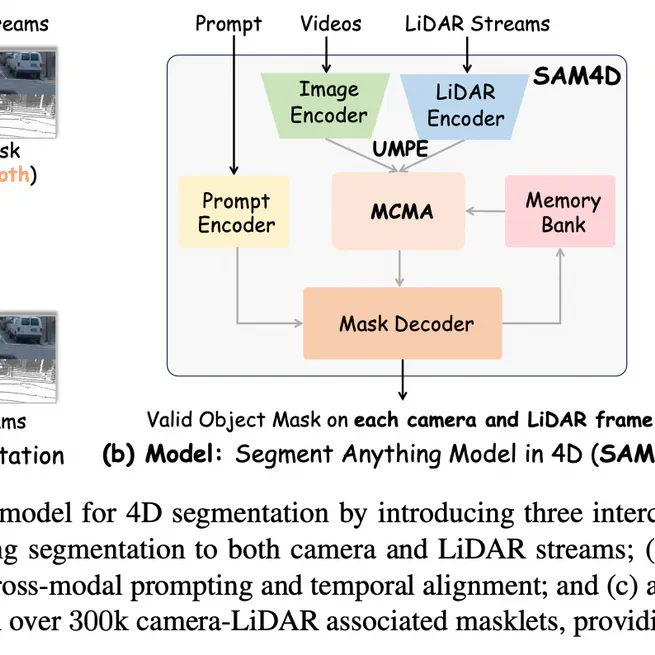
SAM4D: Segment Anything in Camera and LiDAR Streams
Jul 1, 2025
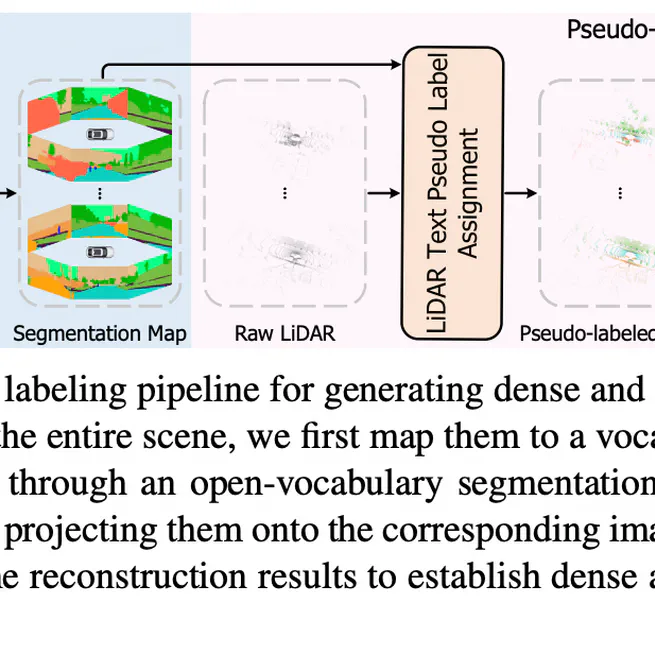
Language Driven Occupancy Prediction
Jul 1, 2025
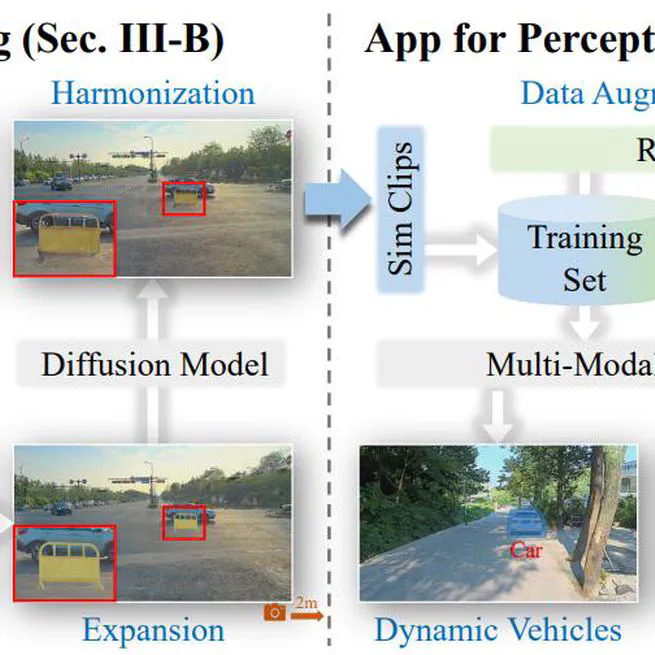
Industrial-Grade Sensor Simulation via Gaussian Splatting: A Modular Framework for Scalable Editing and Full-Stack Validation
Jun 15, 2025