
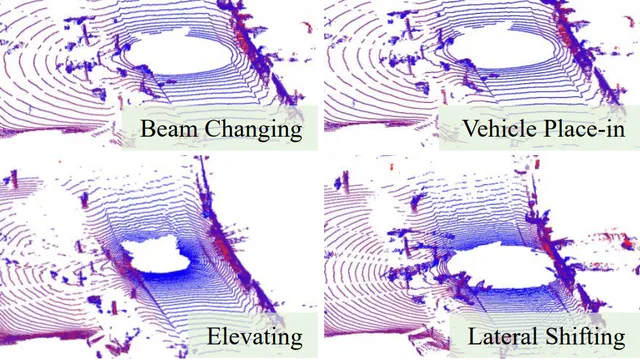
Para-Lane: Multi-Lane Dataset Registering Parallel Scans for Benchmarking Novel View Synthesis
2025. International Conference on 3D Vision.
2025. International Conference on 3D Vision.
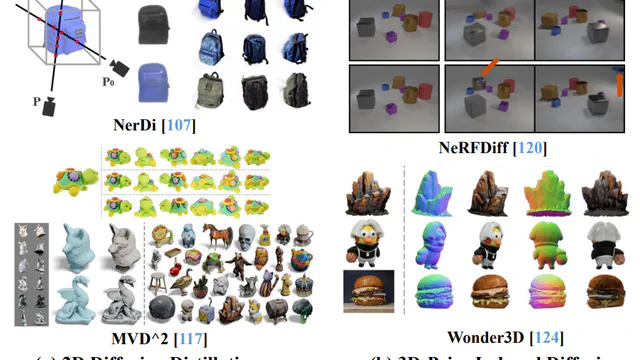
A Survey of Recent Advances in Generative 3D Reconstruction
2025. Journal of Computer Science and Technology.
2025. Journal of Computer Science and Technology.
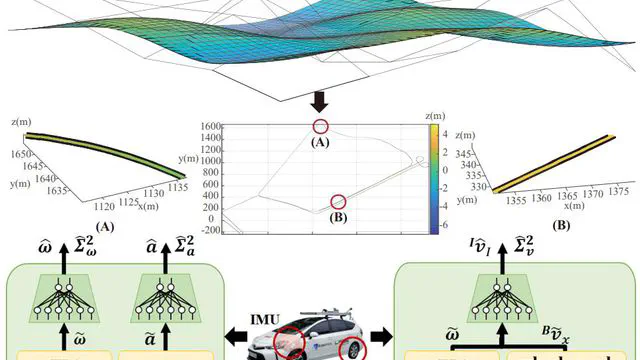
WING: Wheel-Inertial Neural Odometry with Ground Manifold Constraints
2024. IEEE Transactions on Intelligent Vehicles.
2024. IEEE Transactions on Intelligent Vehicles.
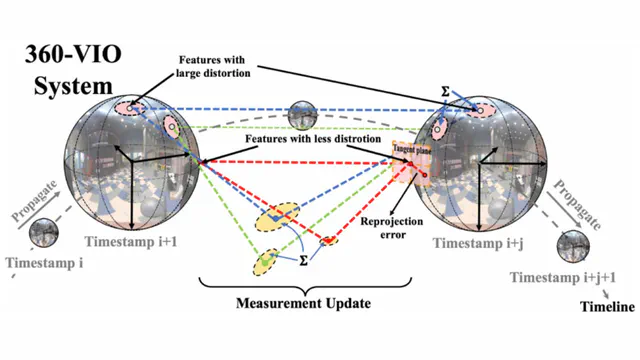
360-VIO: A Robust Visual-Inertial Odometry Using a 360° Camera
2023. IEEE Transactions on Industrial Electronics.
2023. IEEE Transactions on Industrial Electronics.

Noise-Resilient Reconstruction of Panoramas and 3D Scenes Using Robot-Mounted Unsynchronized Commodity RGB-D Cameras
2020. ACM Transactions on Graphics.
2020. ACM Transactions on Graphics.