LiDAR-GS++: Improving LiDAR Gaussian Reconstruction via Diffusion Priors
Jan 20, 2026·,,,,,, ·
0 min read
·
0 min read
Qifeng Chen
Jiarun Liu
Rengan Xie
Tao Tang
Sicong Du
Yiru Zhao
Yuchi Huo
Sheng Yang
Abstract
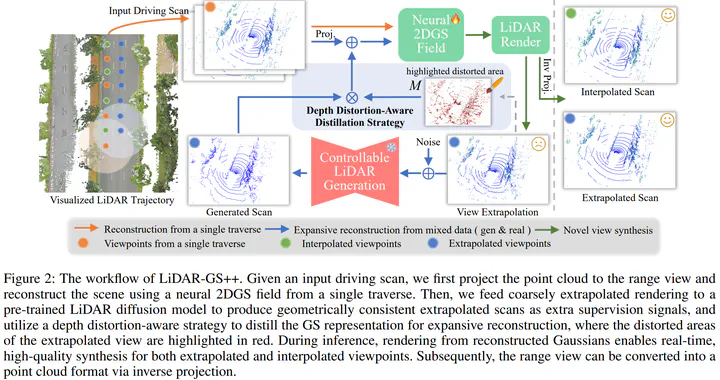
Recent GS-based rendering has made significant progress for LiDAR, surpassing Neural Radiance Fields (NeRF) in both quality and speed. However, these methods exhibit artifacts in extrapolated novel view synthesis due to the incomplete reconstruction from single traversal scans. To address this limitation, we present LiDAR-GS++, a LiDAR Gaussian Splatting reconstruction method enhanced by diffusion priors for real-time and high-fidelity re-simulation on public urban roads. Specifically, we introduce a controllable LiDAR generation model conditioned on coarsely extrapolated rendering to produce extra geometry-consistent scans and employ an effective distillation mechanism for expansive LiDAR Gaussian reconstruction. By extending reconstruction to under-fitted regions, our approach ensures global geometric consistency for extrapolative novel views while preserving detailed scene surfaces captured by sensors. Experiments on multiple public datasets demonstrate that LiDAR-GS++ achieves state-of-the-art performance for both interpolated and extrapolated viewpoints, surpassing existing GS and NeRF-based methods. Our source code will be made publicly available.
Type
Publication
AAAI Conference on Artificial Intelligence